衝突回避自動車
本日の一宮玉野教室 エジソンアカデミーでは最近、増えて来ている自動ブレーキのような赤外線センサーで反応する衝突回避自動車をプログラミングしました。
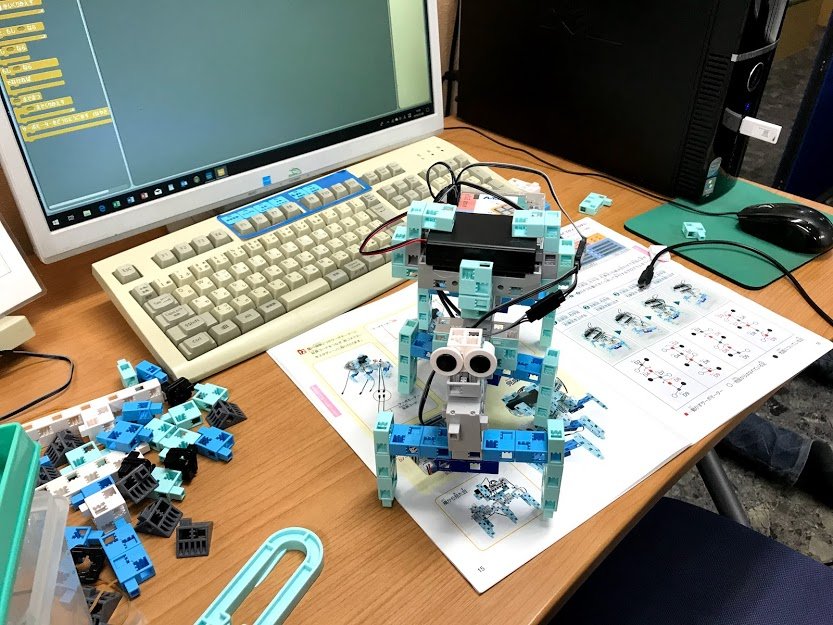
まずは赤外線センサーの仕組みを理解し、タッチセンサーと赤外線センサーを前回作成した車に取付け、自動ブレーキテスト!
次に、壁が迫ってくるとバック、障害物が無くなると再び前進するプログラムに改造。
そして最後は前回の「自動車の制御」の復習、車を曲がらせるプログラミングと組み合わせ、3つの壁を避けながら走るようにプログラミングし、何とかクリアー出来ました。
次回のエジソンアカデミーは2月23日(土)15:30~17:00です。
無料体験のお申し込みは教室まで